









[01811] 서울 노원구 공릉로 232 서울과학기술대학교 컴퓨터공학과 미래관 315호
TEL : 02-970-6707
FAX : 02-970-9734
Copyright (c) SEOUL NATIONAL UNIVERSITY OF SCIENCE AND TECHNOLOGY. All Rights Reserved.
| 제목 | 2024 로봇학회 논문지 우수논문상 수상(최성록교수 MINT Lab) | ||||
|---|---|---|---|---|---|
| 작성자 | 컴퓨터공학과 | 조회수 | 1089 | 날짜 | 2025-04-10 |
| 첨부파일 |
|
||||
|
2024 로봇학회 논문지 우수논문상 수상(최성록교수 MINT Lab)
컴퓨터공학과 이동지능연구실(MINT Lab; https://mint-lab.github.io/) 최성록 교수 연구팀(최진원, 서찬호, 최준혁 학생)이 작성한 영상기반 3차원 복원 기술 관련 논문이 “로봇학회 논문지”(Journal of Korea Robotics Society; https://jkros.org/)의 2024년 우수논문상을 수상하였다. 시상식은 강원도 평창에서 2025년 2월 14일에 열린 제20회 한국로봇종합학술대회(KRoC 2025) 만찬에서 이루어졌다.
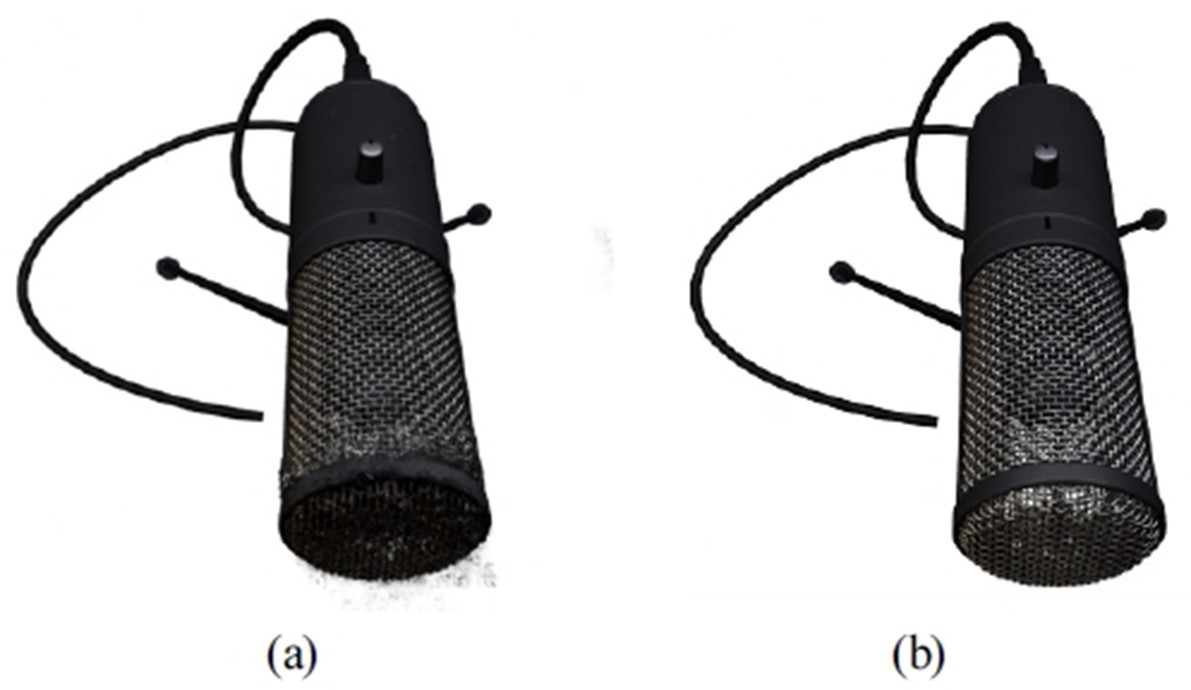
해당 논문은 기존의 NeRF 신경망을 이용한 3차원 물체 복원에서 보다 높은 퀄리티의 3차원 복원이 가능한 최적의 영상 촬영 시점과 거리를 자동으로 선택할 수 있는 방법을 제안한다. 기존의 엔트로피 기반의 지표에 촬영거리를 고려하도록 확장하여 단순히 최적의 촬영 방향뿐만 아니라 최적의 촬영 거리도 선택할 수 있다. 이를 통해 촬영 물체와 영상 개수에서 따라 최대 약 2-4배 가량 높은 3차원 복원 정확도(Chamfer distance 기준)를 달성하였고, 3차원 복원에서 생기는 고스트 현상이나 노이즈도 크게 줄일 수 있었다.
해당 논문은 기존의 NeRF 신경망을 이용한 3차원 물체 복원에서 보다 높은 퀄리티의 3차원 복원이 가능한 최적의 영상 촬영 시점과 거리를 자동으로 선택할 수 있는 방법을 제안한다. 기존의 엔트로피 기반의 지표에 촬영거리를 고려하도록 확장하여 단순히 최적의 촬영 방향뿐만 아니라 최적의 촬영 거리도 선택할 수 있다. 이를 통해 촬영 물체와 영상 개수에서 따라 최대 약 2-4배 가량 높은 3차원 복원 정확도(Chamfer distance 기준)를 달성하였고, 3차원 복원에서 생기는 고스트 현상이나 노이즈도 크게 줄일 수 있었다.
▲ Mic 데이터셋에 대한 (a) 기존 엔트로피 지표를 이용한 3차원 복원 결과와\ (b) 제안하는 거리-엔트로피 지표를 이용한 3차원 복원 결과 |
|||||


